【摘抄】视差图、深度图、点云
Howard Yin 2023-09-13 23:55:00 图形学
原文
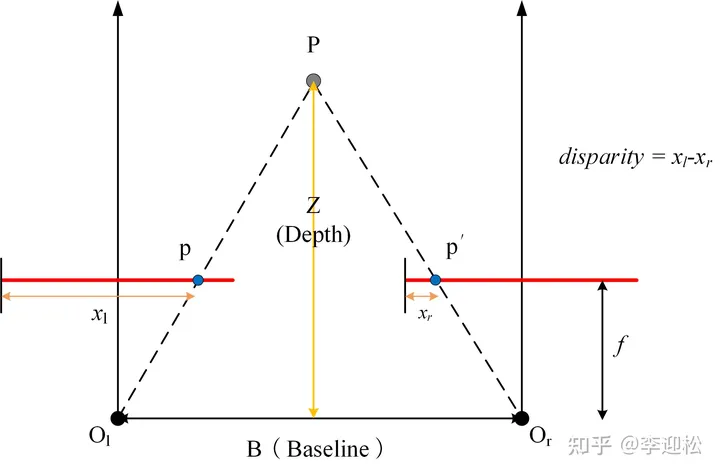
视差(disparity)
视差 d 等于同名点对在左视图的列坐标减去在右视图上的列坐标,是像素单位。d=xl−xr
立体视觉里,视差概念在极线校正后的像对里使用。
深度(depth)
深度 D 等于像素在该视图相机坐标系下 Z 坐标,是空间单位。
深度并不特在校正后的图像对里使用,而是任意图像都可获取深度图。
???
但是这是双目视觉里的视差,和Nerf里的深度depth_map和视差disp_map有点不一样,Nerf里的深度和视差到底是什么意思?还需学习。但从代码里看Nerf里depth_map和disp_map生成出来实际上没有用上。还需要进一步学习。