各种矩阵分解
特征值分解 Eigen Value Decomposition, EVD
前提条件:n×n方阵,且有n个线性无关的特征向量
M=VDVT
其中V是正交矩阵,D是由M的特征值构成的对角矩阵。
QR分解(正交分解)
前提条件:非奇异的实矩阵,不要求是方阵
M=QR
其中Q是正交矩阵,R是上三角矩阵。
可用于解满秩最小二乘问题。
奇异值分解 Singular Value Decomposition, SVD
将QR分解推广到任意的实矩阵
M=UΣVT
其中U和V是正交矩阵,Σ是由M的奇异值构成的对角矩阵。
不仅可以解决满秩最小二乘问题,还可用于解亏秩最小二乘问题。
LU分解 LU Decomposition
前提:所有顺序主子式都不为0
M=LU
其中L是下三角矩阵,U是上三角矩阵。
LU分解在本质上是高斯消元法的一种表达形式。实质上是将矩阵通过初等行变换变成一个上三角矩阵。
Cholesky分解 Cholesky Decomposition
前提条件:对称正定矩阵
M=LTL
其中L是上三角矩阵。
为什么要用SVD解方程
这是一个矩阵形式的线性方程:
Ax=b
高中以来求解线性方程的方法都只能在矩阵的秩R(A)=R([A∣b])的情况下有效(即A和未知数数量相等且没有任何行向量或列向量之间是线性相关的)。
但在现实线性系统中,很多都是要多次取样求平均值,A不是正定更不是方阵,方程数量不等于求解未知量数量,且测量值还有误差没有精确解,这时的求解不像是在解方程而更像是在进行线性回归。
SVD起作用的场合:
- “求解”欠定方程 underdetermined:方程数量没有未知量多,线性方程组无穷多解
- “求解”超定方程 overdetermined:方程数量比未知量多,线性方程组无解
SVD的定义
对于一个秩为r的矩阵Am×n,必存在m×m的正交矩阵Um×m,n×n的正交矩阵Vn×n,m×n的矩阵Σm×n,使得
Am×n=Um×mΣm×nVn×nT=Um×m(Dr×rOOO)m×nVn×nT(9)
其中,Dr×r=⎝⎜⎜⎜⎛λ1λ2⋱λr⎠⎟⎟⎟⎞r×r,λ1≥λ2≥...≥λr>0为ATA的r个 非零特征值 (从大到小排列)。
这里λ1,λ2,⋯,λr称为A的 正奇异值;λ1,λ2,⋯,λr,01,02,⋯,0n−r(从大到小排列)称为A的 奇异值 。
SVD如何解线性方程
假设要解这个矩阵形式的线性方程:
Ax=b
这个线性方程可能欠定也可能超定
先对A进行奇异值分解:
A=UΣVT
而正交矩阵UT=U−1、VT=V−1于是线性方程化为:
AxUΣVTxxxx=b=b=(VT)−1Σ−1U−1b=VΣ−1UTb=A+b
其中,A+=VΣ−1UT称为伪逆矩阵(pseudo inverse)。
这样求出来的x=A+b可证明存在如下性质:
- 若Ax=b是欠定方程的表示,那么x=A+b是最小正则化解:
s.t.min∥x∥Ax=b
- 若Ax=b是超定方程的表示,那么x=A+b是最小二乘解:
min∥Ax−b∥
深入:SVD几何含义,方阵的情况
对于一n维到n维的线性变换A(n行n列),求一组n个相互正交的n维单位向量vi,i∈[1,n],使其在线性变换后仍然相互正交。
单位向量vi,i∈[1,n]在变换后不一定是单位向量,所以用一常数σi和单位向量ui,i∈[1,n]表示:
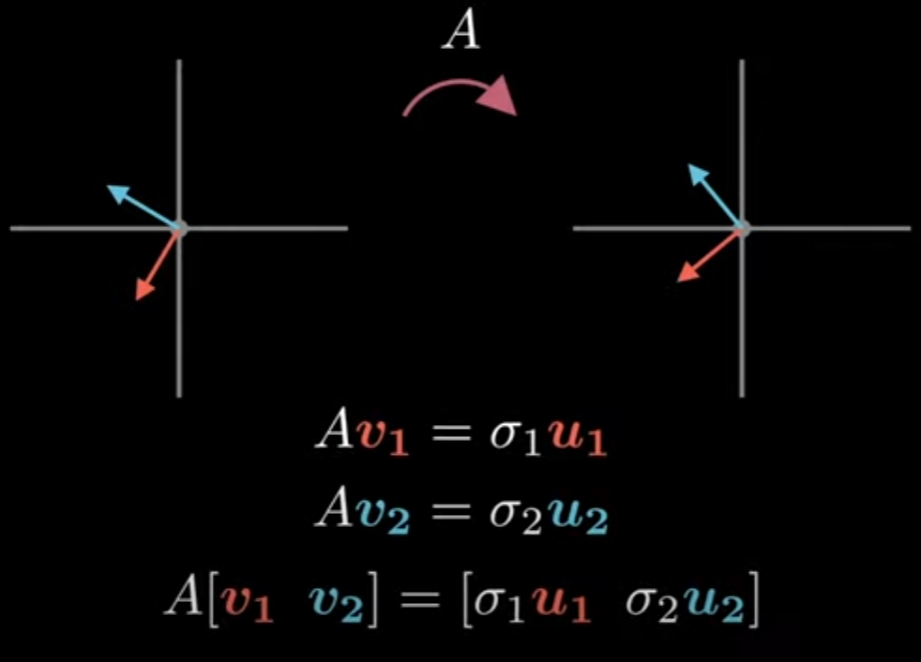
上图扩展到n行n列,用矩阵形式表示:
A[v1…vi…vn]=[σ1u1…σiui…σnun]=[u1…ui…un]⎣⎢⎢⎢⎢⎡σ10⋮00σ2⋮0⋯⋯⋱⋯00⋮σn⎦⎥⎥⎥⎥⎤
令:
VUΣ=[v1…vi…vn]=[u1…ui…un]=⎣⎢⎢⎢⎢⎡σ10⋮00σ2⋮0⋯⋯⋱⋯00⋮σn⎦⎥⎥⎥⎥⎤
于是上述方程化为:
AV=UΣ
即:
A=UΣVT
非常清晰。
深入:SVD几何含义,矩阵的情况
以行数小于列数的矩阵为例,A=UΣVT可以理解为降维变换:
V的列向量相互正交且是单位向量,所以它就是一个旋转:

Σ可以分成一个对角方阵和单位对角矩阵,其中单位对角矩阵相当于一个维度删除操作:
而对角方阵则是在降维后在各坐标轴上的拉伸:
最后U的列向量相互正交且是单位向量,所以也是一个旋转:
深入:SVD的求解
首先:
- 由于vi和ui都是相互正交的单位向量,所以有V−1=VT,VVT=1和U−1=UT,UUT=1
- 由于Σ是对角矩阵,所以有ΣΣT=ΣTΣ=Σ2
于是:
AATATA=UΣVTVΣTUT=VΣTUTUΣVT=UΣΣTUT=VΣTΣVT=UΣ2UT=VΣ2VT
所以,要求解U、V、Σ,对AAT和ATA做特征分解(Eigendecomposition,又称谱分解 Spectral decomposition)即可。
根据矩阵特征值的性质可知,AAT和ATA特征值必相同,Σ2就是其特征值组成的对角矩阵,而U和V分别是AAT和ATA的特征矩阵。
深入:SVD怎么解最优化问题
可用SVD解的方程最直观的表示为“求使Ax最大(或同理可求最小)的单位向量x”:
s.t.xmax∥Ax∥2∥x∥=1
换个形式:
s.t.xmaxxTATAx∥x∥=1
根据特征值的定义,ATA的特征值λ要满足ATAx=λx:
ATAxxTATAxxTATAx=λx=λxTx=λ
所以xTATAx的值必然是ATA的特征值中的一个。
于是,xTATAx的最大值取ATA的特征值中的最大值即可,最大特征值对应的特征向量就是x的最优解。
而SVD中的V是ATA的特征矩阵、Σ2是ATA的特征值组成的对角矩阵,所以直接去Σ2中找到最大值(或最小值)即最优值λ,其在V中对应的列就是最优解x。
深入:SVD存在性证明
没必要,看下几何含义啥都懂了,数学证明还是算了吧
深入:SVD和主成分分析