【转载】MobileNeRF论文解析
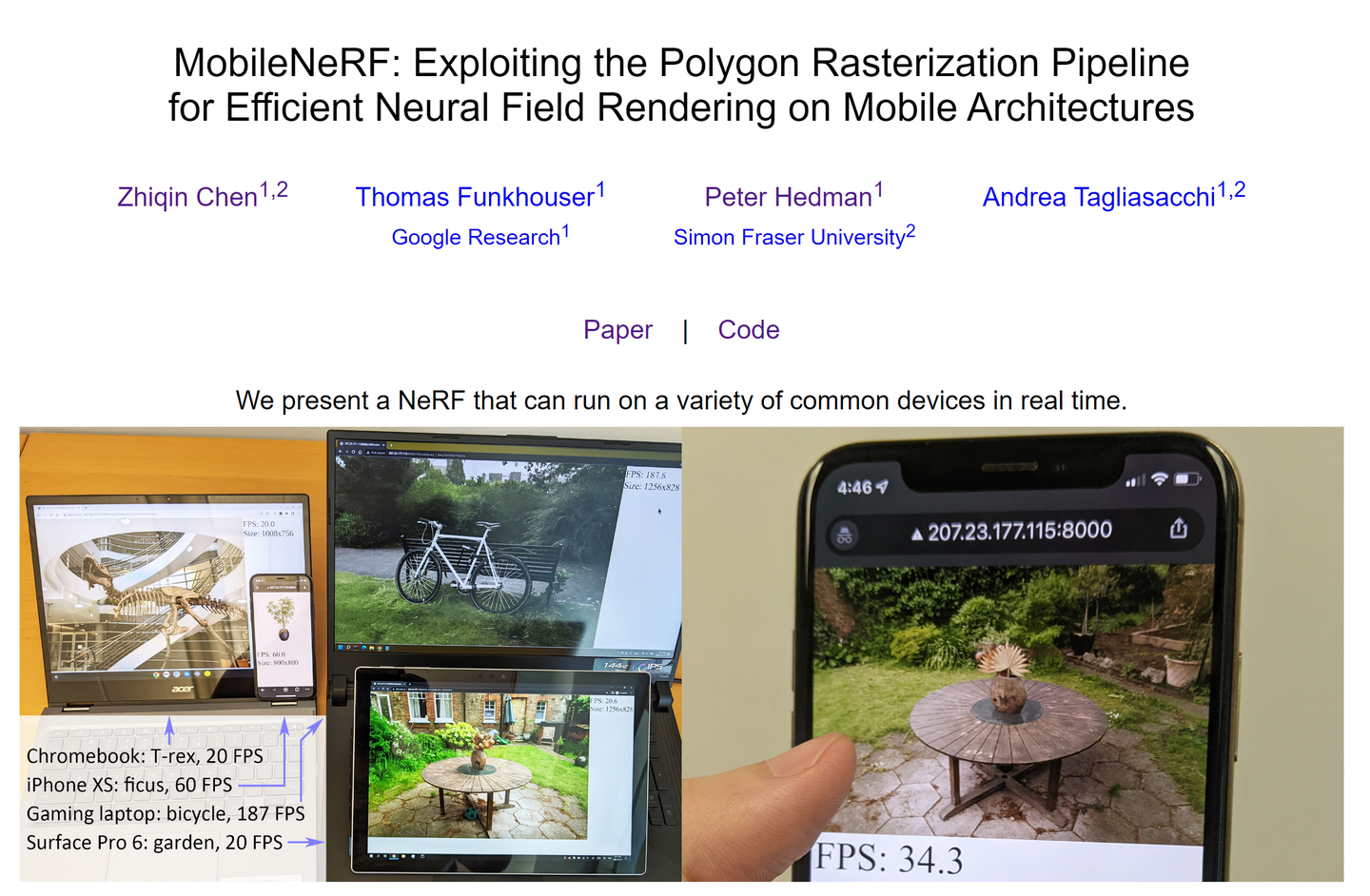
本文亮点:首次实现在移动设备上的实时神经渲染
# 1.预备知识
# 1.1 NeRF回顾
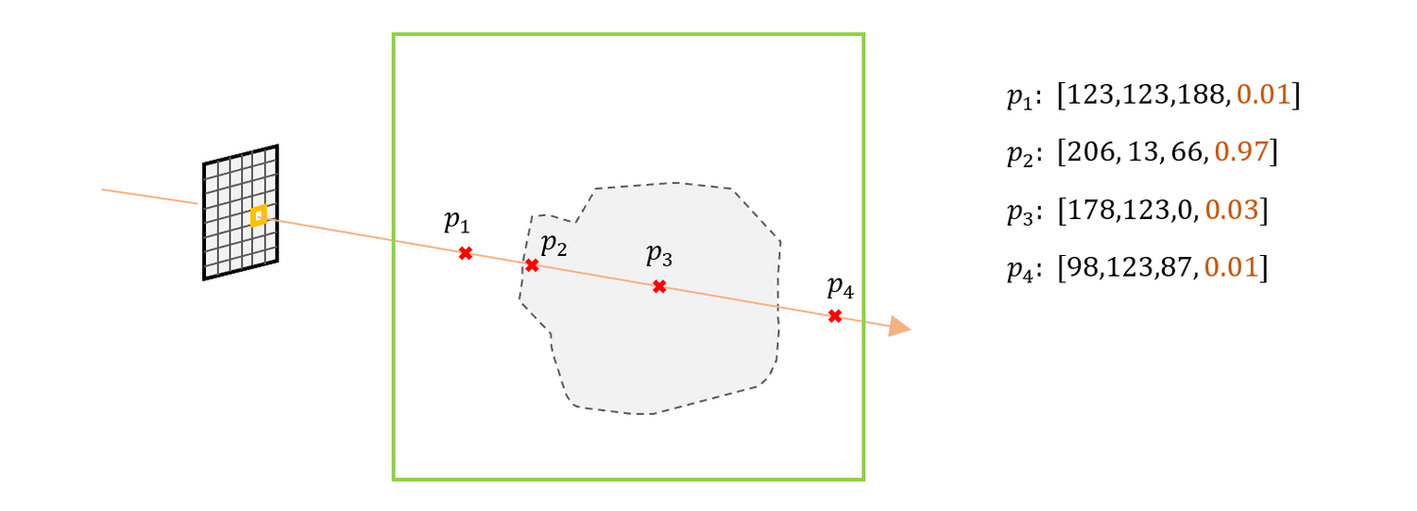
1)给定相机内外参数,可计算出一条穿过每个像素的射线。在该射线上采样N个点。
2)创建一个神经网络,输入为5维数据,输出为4维数据。将这N个点的空间坐标 (x,y,z)
,以及射线方向 (θ,ϕ) ,输入到该网络中,获得每个点的颜色和浓度 (r,g,b,σ)
3)将每个点的颜色按照浓度进行加权融合,计算得到该像素最终的颜色。
NeRF训练和推理非常缓慢。在推理时,渲染一张800x800的图像耗时1min左右, 原因是因为对于每个像素要采样N个采样点,每个采样点要经过一个MLP进行推理计算,导致计算量较大。
那么如何提升NeRF的推理效率?
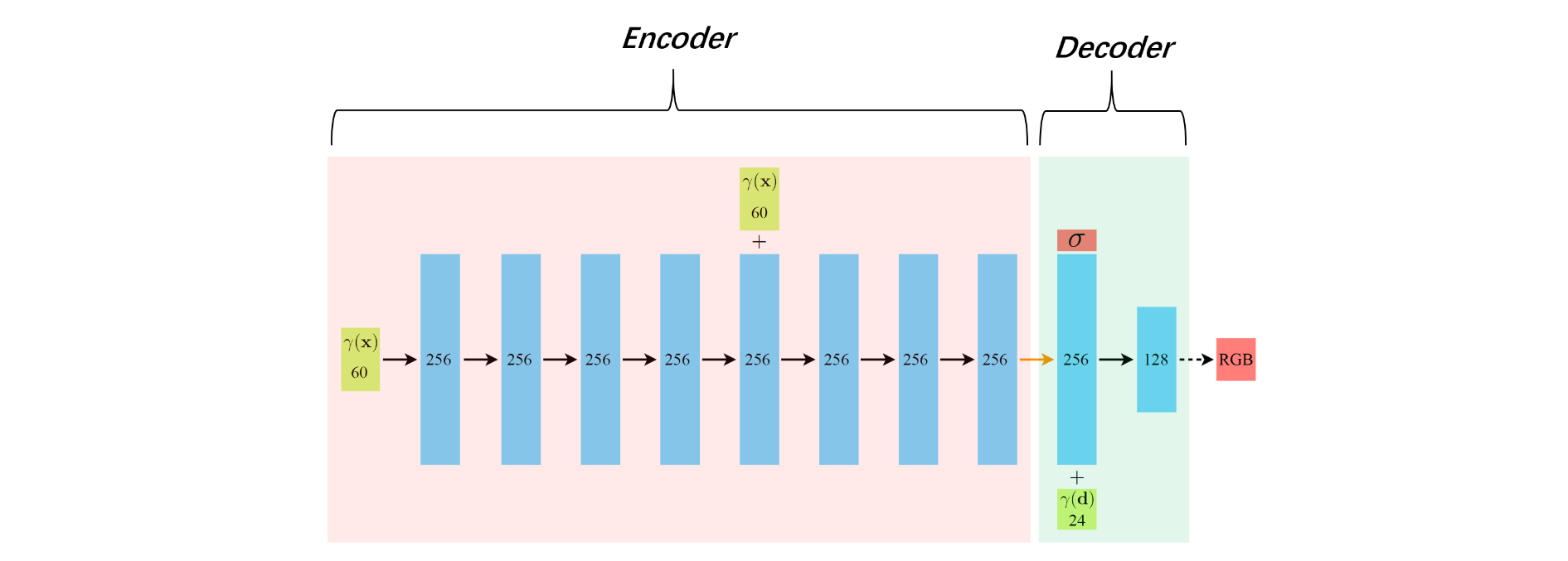
把NeRF的MLP部分进一步拆解成Encoder和Decoder,见图2。 Encoder部分将一个空间坐标点编码成256的特征向量,然后通过Decoder部分,把特征向量以及视线方向解码成一个色彩值RGB和浓度值 σ 。若能将Encoder部分输出的特征向量提前存储,在实时渲染阶段,直接读取该特征向量,仅使用Decoder部分实时推理, 则会节省大量的计算。
# 1.2 图形渲染基本原理
我们看到的渲染画面(例如游戏画面),一般由GPU的渲染管线来完成。这里仅介绍最简单的基本原理。感兴趣的可以去看闫令琪的Game101课程。
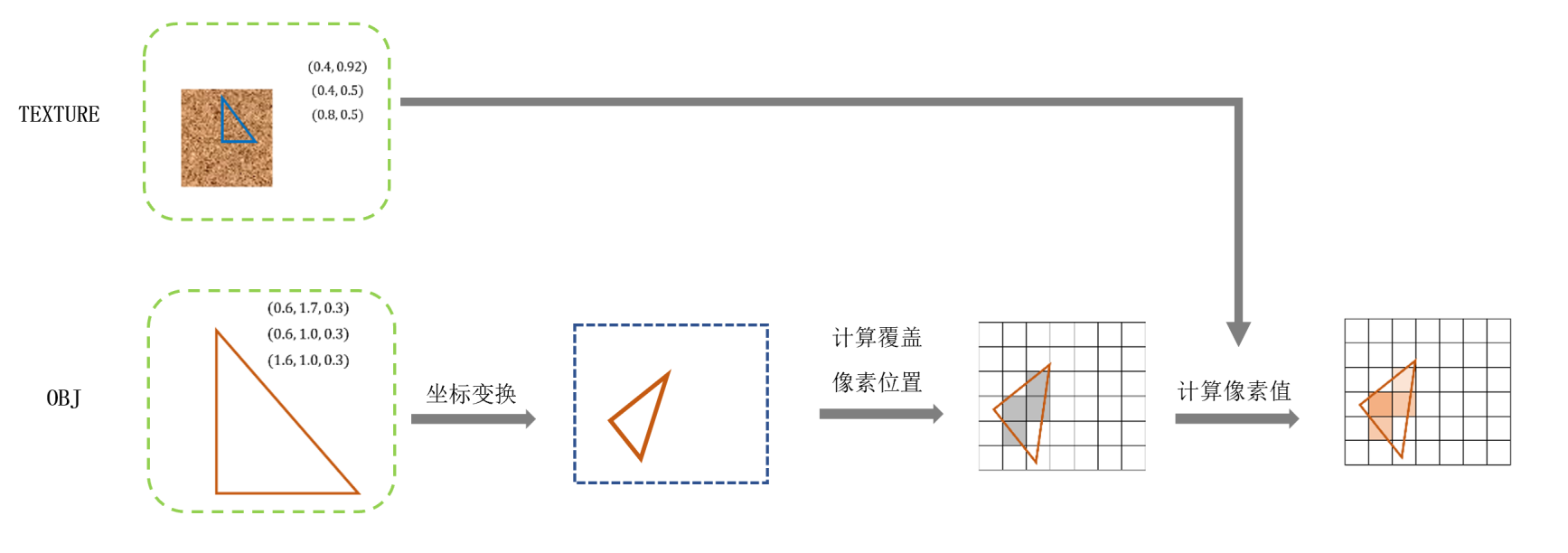
模型数据 :模型的几何形状由一堆三角面片描述,每个三角面片由三个顶点构成。而每个三角面片的颜色存储在模型纹理图像中。模型会存储每个顶点的空间坐标,如图3左下的“OBJ”,以及每个顶点对应的纹理坐标,即每个三角网格面片对应着纹理图像中的一块三角区域,如图3左上的“TEXTURE”
模型数据要经过如下 渲染流程 ,如图3:
1)读取OBJ里的顶点3d坐标,以及对应的uv坐标
2)顶点坐标依次经过model, viewport, projection坐标空间变换,将3d坐标变成2d的屏幕坐标(像素坐标)
3)找出在屏幕坐标系下,当前三角面片覆盖的所有像素坐标,这一步也叫做光栅化。
4) 在已知每个顶点坐标的情况下,很容易获得每个像素坐标对应的纹理坐标(双线性插值,Mipmap插值等等)
5)根据纹理图像中对应坐标的颜色,赋值给该像素
其中, 步骤(2)和(5),在现代GPU渲染管线里,允许写脚本进行定制化操作,这部分代码叫做“ shader ”
例如,美术提供了一个带彩色纹理的怪物,但是当怪物死亡时,可以通过shader代码实现黑白色的怪物外表,而不需要美术同时提供黑白色的纹理。
而光栅化,可以看成是对于每个像素发射一条穿过相机中心的射线,找出该射线与三角网格的交点。当射线与场景中多个网格存在交点时,一般会使用离相机最近的交点作为唯一交点。这类似于NeRF的光线路径采样时,仅采样离相机最近的表面交点。
伪代码如下:
# 3D模型的定义
class Model3D:
list_vertice_coord # 所有顶点坐标
list_uv_coord # 所有纹理坐标,与顶点位置一一对应
list_face_index # 每个三角面片由哪几个顶点组成
Model3D # 加载模型顶点数据
TEXTURE # 加载模型纹理数据
# 采用Shader来对渲染管线进行定制化
class Shader:
# 处理每个顶点坐标
def vert(vertice):
# 变换模型坐标到屏幕坐标
screen_coord = MVP(vertice)
# 此处可以写其他顶点操作,例如膨胀
return screen_coord
# 计算每个像素值
def frag(uv):
rgb = TEXTURE[uv] # 根据uv坐标,获得纹理图像上的像素值
# 此处可以写其他颜色操作,例如转成黑白色
return rgb
for each_face in Model3D.list_face_index:
# 获得每个三角面片的顶点坐标和uv坐标
vertices = get_vertices(each_face) # 3x3
uvs = get_uvs(each_face) # 3x2
# 将顶点坐标由模型坐标系变换到屏幕坐标系
screen_coords = Shader.vert(vertices) # 3x3,此处还保留着每个像素的深度
# 当前三角面片在屏幕显示时,会覆盖哪些像素
covered_pixels = get_covered_pixels(screen_coords) # Nx2
# 计算像素值
for each_pixel_coord in covered_pixels
# 给定每个顶点的uv,插值计算当前pixel的uv
interpolated_uv = get_interpolated_uv(each_pixel_coord, uvs)
# 该像素上最终的色彩值
rgb = Shader.frag(interpolated_uv)
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
# 2.MobileNeRF的渲染过程
假如我们设计了一种NeRF,结构如下:
1)每条射线上的采样点位置和个数(且远少于原始NeRF)是已知的
2)每个采样点的位置特征向量(NeRF的Encoder部分输出)是预先存储好的
3)仅执行NeRF的Decoder推理
4)对于当前待渲染画面的每个像素,上述的计算是在GPU上并行的
那么这种新NeRF,相比原始NeRF,显然会大幅降低计算量。
MobileNeRF通过利用GPU渲染管线的光栅化过程,实现了这种能在移动设备上实时渲染的NeRF, 见图4与图5:
1)将整个场景的几何表面,使用非半透明的三角网格来表示。这意味着,对于待渲染画面的每个像素,会直接获得射线与三角面片的交点,作为整条射线路径上唯一的采样点
2)顶点对应的纹理图像,存储的不再是该顶点的颜色,而是该空间点的“空间特征”,即NeRF的Encoder输出特征
3)将NeRF的Decoder部分,写入到Shader里,可以称之为Neural Shader
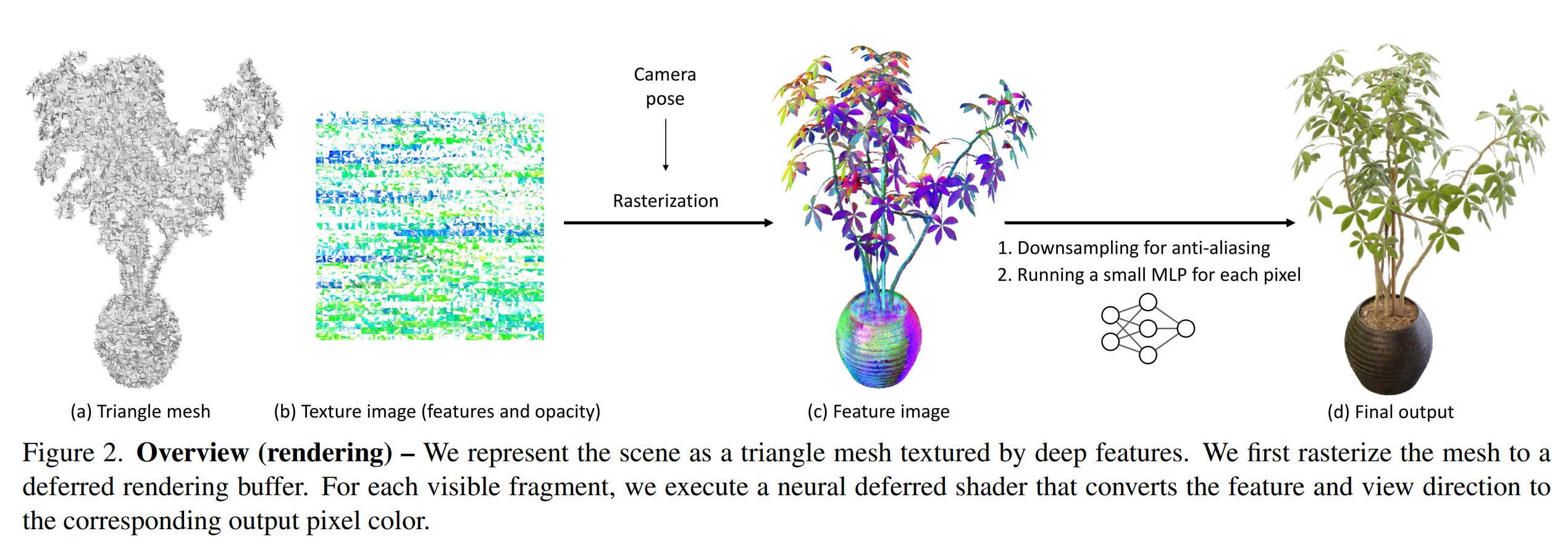
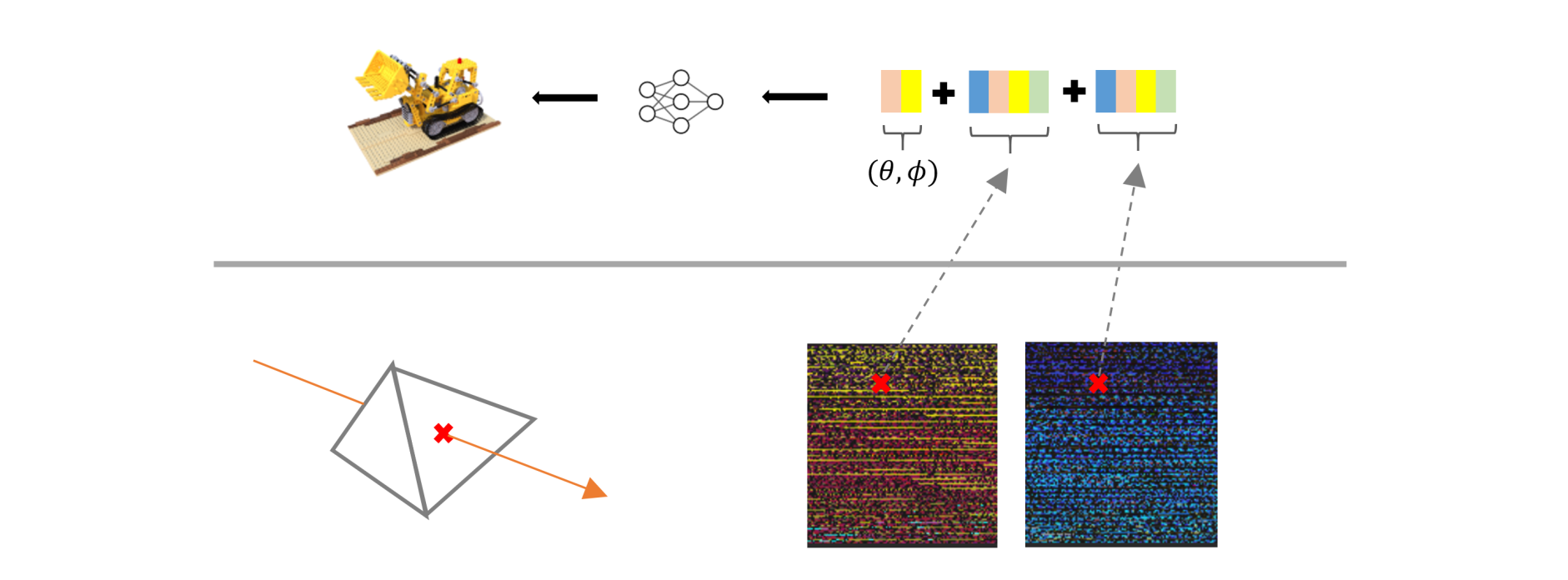
如图5, 因为纹理图像的每个像素仅能存储4个通道(RGBA)的数据,所以当Encoder输出8维特征时,需要分别使用两张纹理图像来表示。在Neural Shader中,把根据uv坐标读取的两个特征,以及射线方向,一起输出到一个浅层mlp中,最终解码出该像素的色彩值
# 3. MobileNeRF的训练过程
为了实现上述的渲染过程,作者将训练分为三个阶段:
(1)初始化一个grid mesh,基于可微渲染思想,学习场景的几何结构,以及透明度 α 连续的 Radius Field
(2)将 α 二值化
(3)对grid mesh进行剪枝操作,保存为OBJ,以及烘培特征向量为纹理图像TEXTURE,保存Decoder的网络权重
# 3.1 训练阶段一
3.1.1 总览
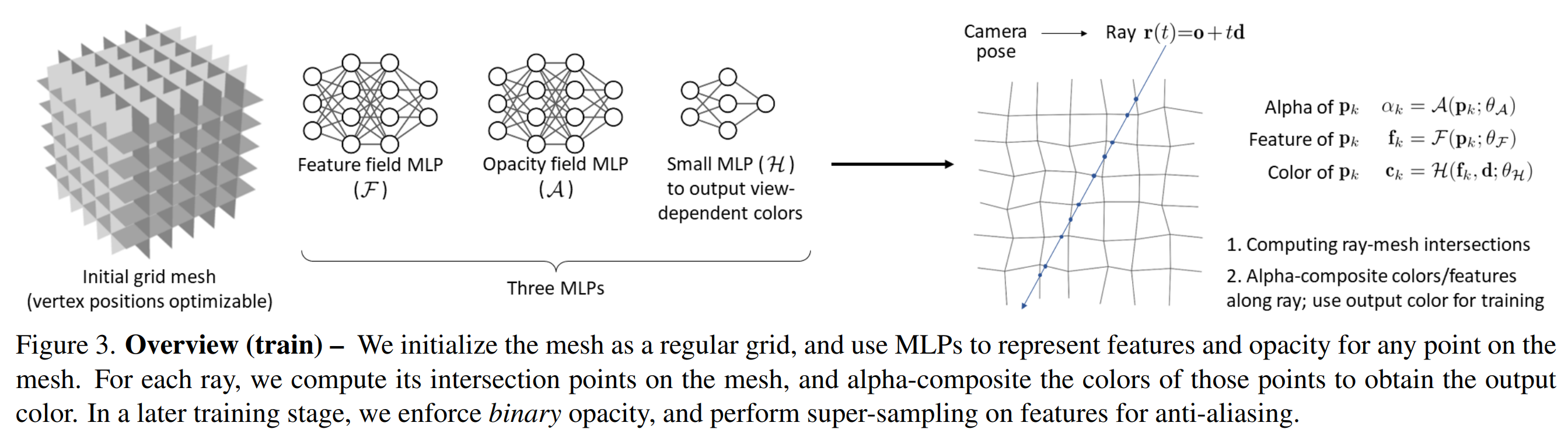
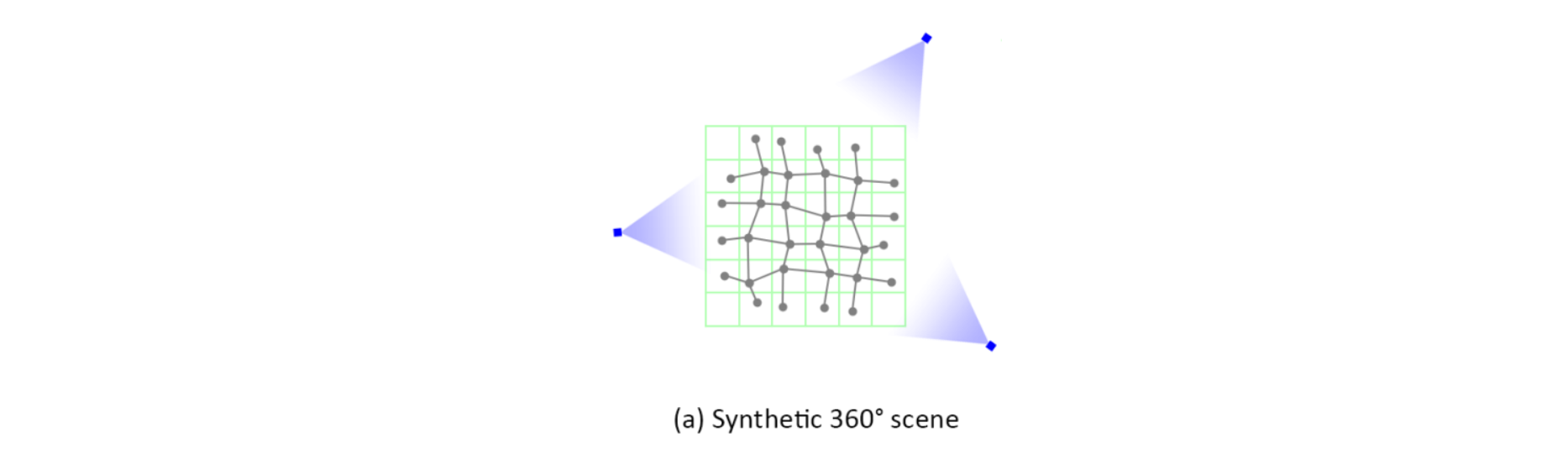
(1)初始化一个形状如格子间的三维grid mesh, 见图6最左侧
(2)根据相机位姿以及像素坐标,计算一条射线
(3)射线与grid mesh的交点 pk 作为采样点, 见图6最右侧。这里与近似平均采样的原始NeRF策略不同
(4)创建3个MLP:
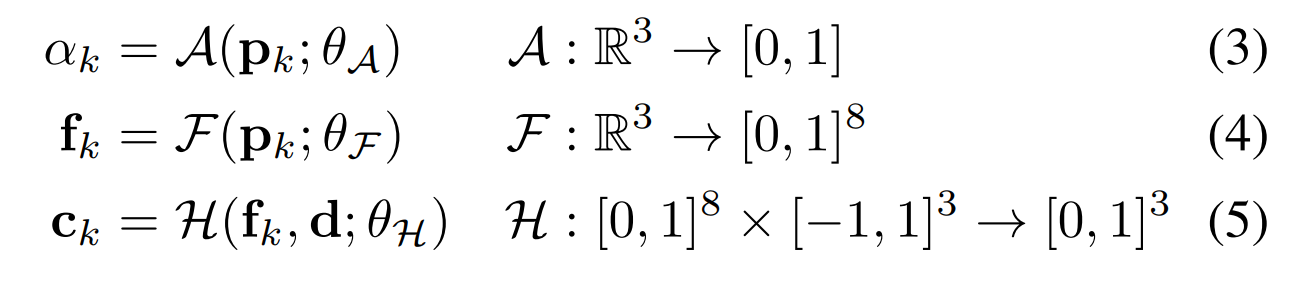
A :预测采样点的透明度 α ( 注意 ,此处非NeRF系列中的浓度 σ )
F :预测采样点的空间特征向量 fk ,即 F 是前面提到的 Encoder
H :根据特征向量和视线方向,预测采样点的颜色 ck ,即 H 是前面提到的 Decoder
将每个交点的颜色 ck 按照透明度 αk 进行加权融合,获得该像素的预测值 C(r) ,然后与真值 Cgt(r)
计算L2 Loss。加权融合计算如下式:

3.1.2 初始grid mesh的定义与优化
定义一个中心在原点,尺寸为1的PxPxPx3的voxel grid, 每个网格中设置一个点,作为顶点vertice,将相邻的4个vertice连接,组成mesh的face, 整个mesh被称为grid mesh:
MobileNeRF采用了可微渲染的思想,把vertice位置作为可训练的参数,通过反向传播loss,优化其位置,达到“三维重建”的目的。
可以将顶点位置理解为某个函数的“权重参数”,该函数负责计算射线与mesh的交点,那么最终的loss显然会推动顶点位置的变化: pk=P(r(tk));V)
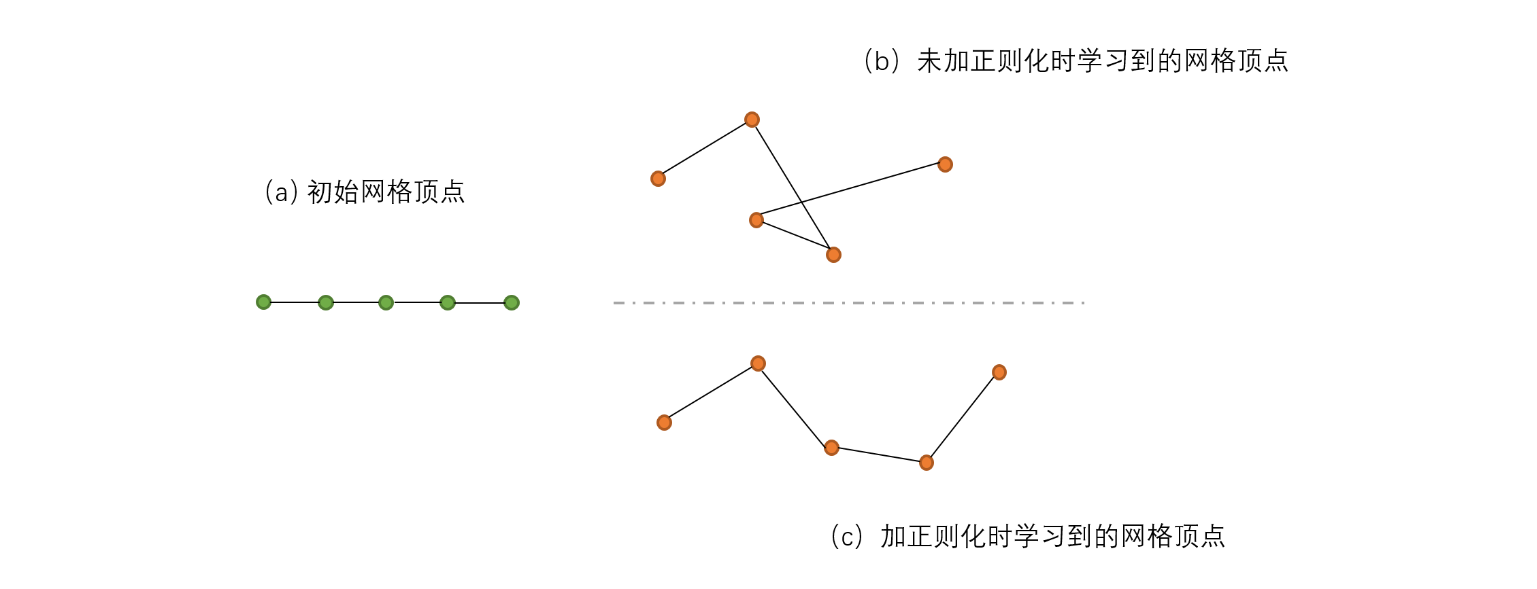
作者通过正则化限制每个顶点的“活动范围”在格子内:
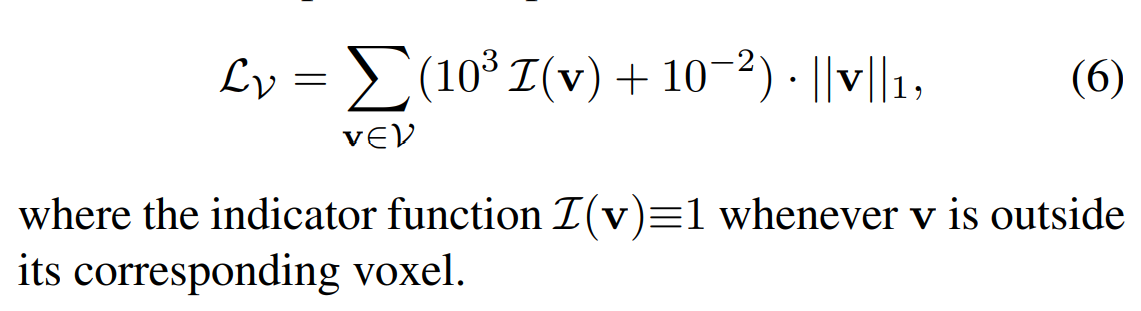
我个人的理解是,这么做可以防止学习到的顶点之间互相穿插:
3.1.3 训练加速
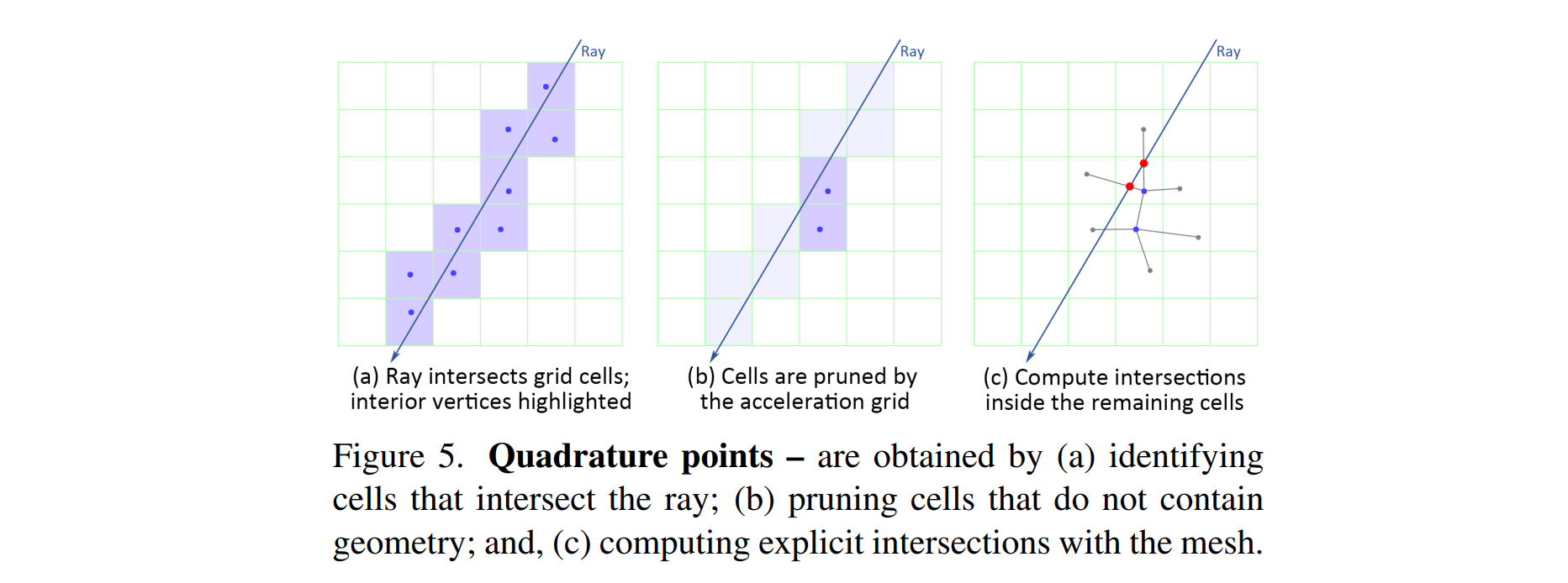
作者借鉴instant NGP,创建了另一个PxPxPx1的grid mesh,用于加速训练过程,见图9。每个网格用来预测当前网格内存在几何表面的可能性。加速过程如下:
(1)先在加速网格中找到射线穿过的grids
(2)根据加速网格的预测值,删除不含几何表面的grids
(3)在剩下的网格中,计算射线与mesh的交点

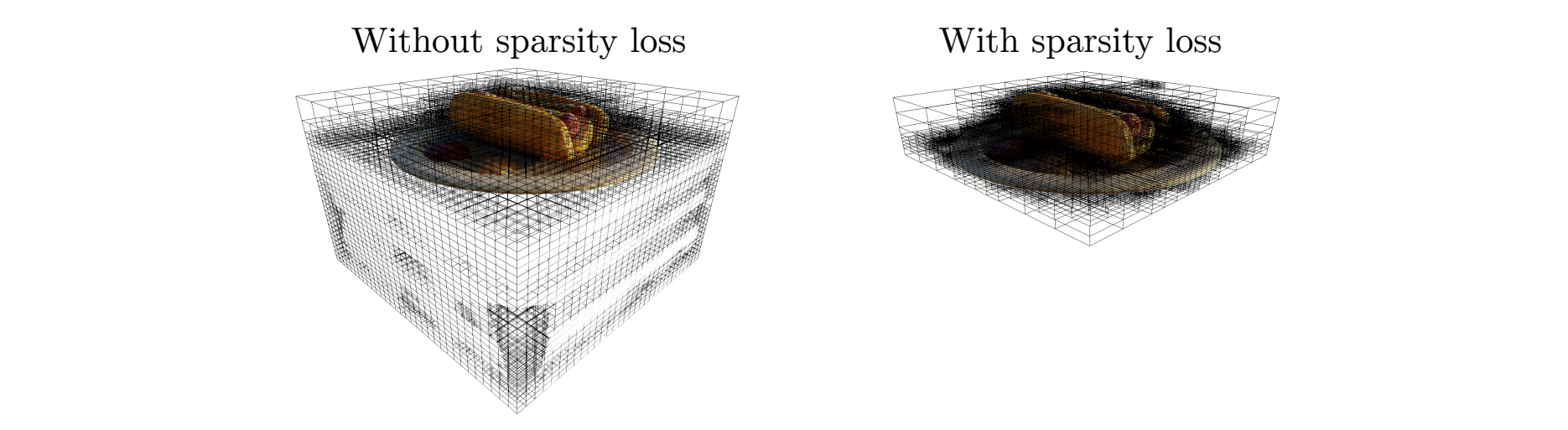
作者又增加了一个sparsity loss和smooth loss,

原始NeRF在训练时,对于未观测到的区域,或者背景区域,会因为缺乏足够的立体约束,导致生成了大量的“solid”噪点。通过引入sparsity 正则化(原文称为loss),会迫使上述区域变得“empty”, 如图10
在第一阶段训练完毕后,我们获得了:
(1)顶点位置优化过后的 grid mesh , 充当整个场景的“三维几何结构”
(2)透明度 α 在0到1之间的神经网络 A
(3)NeRF Encoder部分: F
(4)NeRF Decoder部分: H
# 3.2 训练阶段二
上一阶段训练完毕后,每个采样点的透明度 α 为0到1之间。因为在渲染引擎里,处理半透明的mesh,比不透明的要更耗时,因此需要将透明度进行二值化——0或者1。将 αk 修改如下:

" Please note that the gradients are transparently passed through the discretization operation (i.e. ∇αˆ ≡ ∇α), regardless of the values of αk and the resulting αk∈{0,1} "
为了让训练更稳定,在第二阶段的训练过程中,作者既渲染合成透明度二值化时的最终图像 C^(r) ,又渲染合成透明度连续时的图像 C(r) , 然后同时计算两者的loss:

当loss(14)收敛后,会固定住其他参数,仅finetune神经网络 F 和 H
# 3.3 训练阶段三
接下来,需要把前两阶段训练好的几何结构grid mesh保存为OBJ,以及将Encoder部分( F )输出的特征向量烘培到纹理图像中。
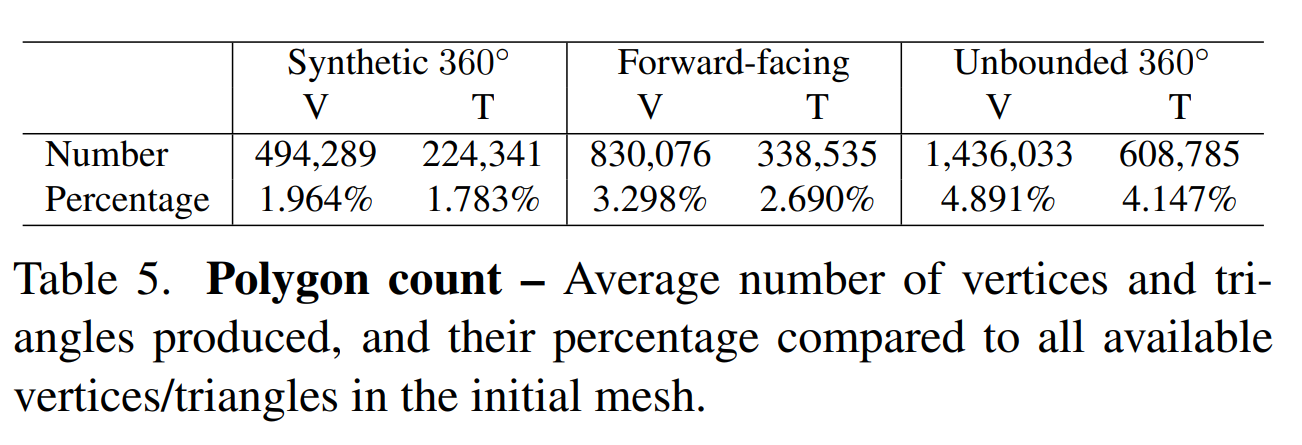
(1)将训练图像完全无法“看到”的face删除。通过下表,可以看出95%以上的grid,都要被删除
(2)将剩余的每个face的顶点数据保存到OBJ中
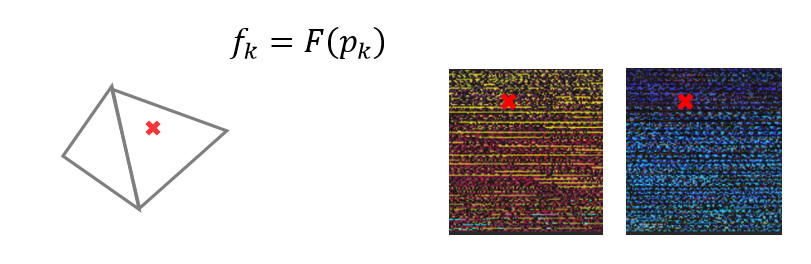
(3)给每个face(四边形)分配一个分辨率为KxK的纹理区域(texture patch),因为face的顶点坐标是已知的,那么很容易计算出texture patch上每个像素对应的空间坐标,从而根据公式(4)获得相应的特征值。这样,就完成了烘培特征纹理的工作。
(4)保存Decoder网络的权重
# 3.4 抗锯齿
略
# 4. 优缺点
优点:
- 第一次实现了移动设备上的实时神经渲染
- 通过引入OBJ和TEXTURE,使得很多传统图形优化技术,可以直接使用。例如对大型场景的LOD,九宫格加载等
缺点:
- 仅通过一个采样点来代表整条光线路径,当需要表现出半透明或者高光等复杂光学现象时,需要较高的模型精度以及准确的材质模型,mobileNeRF并不擅长解决后两者。
- 通过固定分辨率的网格,来学习表达整个空间,会导致两个问题:(1)细节分辨率不够(2)大块平坦区域的mesh过于碎片化,顶点数过多。
- 为了降低最终的obj顶点数量,在第三个阶段,删除了对于训练图像完全不可见的face。这会要求采集训练图像时,需要覆盖几乎所有渲染阶段需要的相机角度。否则会在渲染画面中出现大量的空洞。另外,这种删除策略也会损失模型的“泛化能力”,表现是在相邻相机角度切换时,出现“画面突变”
- 训练时间太长:8卡A100,训练24小时左右