libvpx再深入一点
前置知识:先学会最外层的API
本文将深入一点点找到内部的编解码函数的调用过程。
在《libvpx的使用方法简析 - simple_decoder.c》我们了解到解码过程是调用两个API函数vpx_codec_decode和vpx_codec_get_frame,也知道了这两个函数核心也只是在调用vpx_codec_iface里的dec.decode和dec.get_frame。
而在《libvpx的使用方法简析 - simple_encoder.c》我们也了解到编码过程也是调用两个API函数vpx_codec_encode和vpx_codec_get_cx_data,而这两个函数也是调用的vpx_codec_iface里的接口enc.encode和get_cx_data。
除此之外,我们还知道vpx_codec_iface的实现分为vp8和vp9两个版本,两个版本都有各自的编码器实现和解码器实现:
- vp9解码器实现是
vpx_codec_vp9_dx - vp9编码器实现是
vpx_codec_vp9_cx - vp8解码器实现是
vpx_codec_vp8_dx - vp8编码器实现是
vpx_codec_vp8_cx
显然,这些接口实现里的函数就是具体的编解码过程。这样,我们进一步深入的入口就从这些实现开始。
# vp9解码
vp9解码器实现是vpx_codec_vp9_dx:
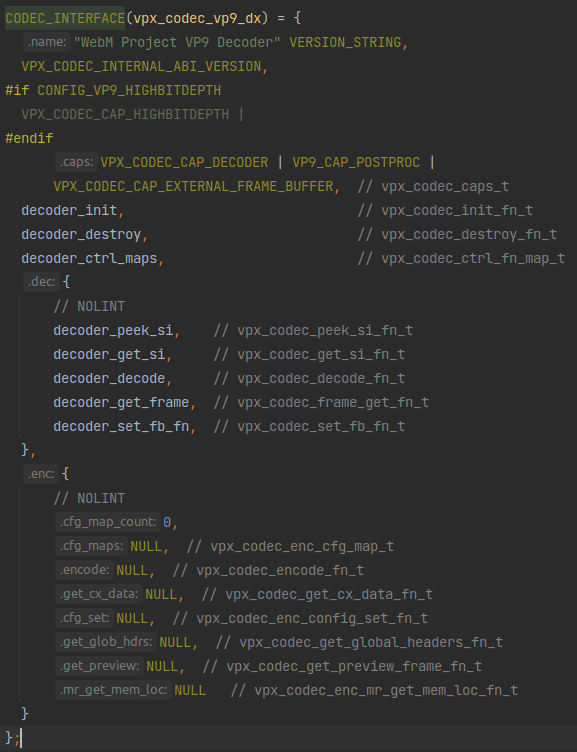
而其中decoder_decode就是dec.decode、decoder_get_frame就是dec.get_frame。
# decoder_get_frame
先看比较简单的decoder_get_frame:
static vpx_image_t *decoder_get_frame(vpx_codec_alg_priv_t *ctx,
vpx_codec_iter_t *iter) {
2
函数开始。
vpx_image_t *img = NULL;
这个是要返回的结果,就是一个帧图像。
// Legacy parameter carried over from VP8. Has no effect for VP9 since we
// always return only 1 frame per decode call.
(void)iter;
2
3
从注释中可以看到这里是一个历史遗留问题,vp9每次decoder_get_frame只会返回一帧,不需要像vp8那样迭代,所以迭代器参数在vp9里没用。
if (ctx->pbi != NULL) {
首先必须要有ctx->pbi的存在才能进行下面这些操作。
YV12_BUFFER_CONFIG sd;
vp9_ppflags_t flags = { 0, 0, 0 };
if (ctx->base.init_flags & VPX_CODEC_USE_POSTPROC) set_ppflags(ctx, &flags);
2
3
首先设置了vp9_ppflags_t。从这个if里的判断条件看,这应该是控制后处理过程的设置。
关于视频解码的后处理,可以参考ffmpeg对后处理的介绍:《wiki:Postprocessing》
if (vp9_get_raw_frame(ctx->pbi, &sd, &flags) == 0) {
这里的判断就蕴含着本函数的核心处理过程:
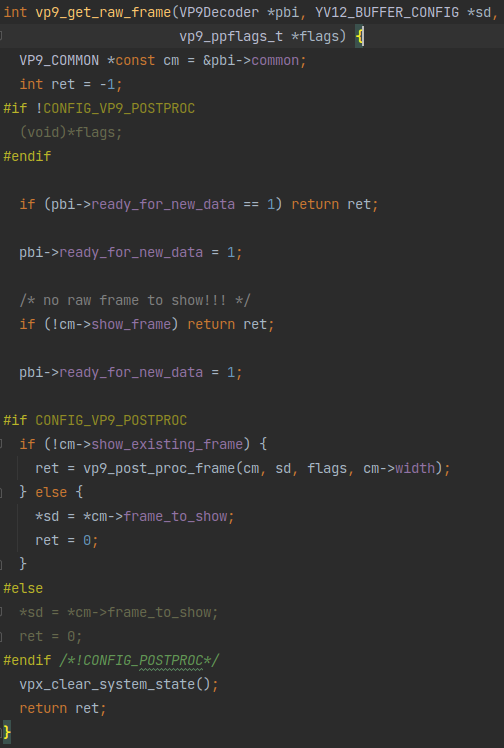
可以看到,其实就是把数据从pbi->common里找出来放进sd里,并且如果有定义后处理过程就进行一下后处理。
VP9_COMMON *const cm = &ctx->pbi->common;
RefCntBuffer *const frame_bufs = cm->buffer_pool->frame_bufs;
2
取出了一个pbi里的变量和一个什么buffer。
ctx->last_show_frame = ctx->pbi->common.new_fb_idx;
这里看着像是把之前解码好的帧存储为“上一帧”的操作。
if (ctx->need_resync) return NULL;
这个need_resync应该是vp9_get_raw_frame里面返回的什么错误吧。
yuvconfig2image(&ctx->img, &sd, ctx->user_priv);
这函数名显然是用于吧sd里的帧数据转成img格式的操作。
ctx->img.fb_priv = frame_bufs[cm->new_fb_idx].raw_frame_buffer.priv;
这里看着也像是把之前解码好的帧存储为“上一帧”的操作。
img = &ctx->img;
return img;
2
返回了。这个&ctx->img应该就是在yuvconfig2image从sd转换过来的帧图像了。
}
}
return NULL;
}
2
3
4
函数结束。
# decoder_decode
再来看稍微复杂一点的decoder_decode:
static vpx_codec_err_t decoder_decode(vpx_codec_alg_priv_t *ctx,
const uint8_t *data, unsigned int data_sz,
void *user_priv, long deadline) {
2
3
函数开始。
const uint8_t *data_start = data;
const uint8_t *const data_end = data + data_sz;
2
首先是计算原始数据的起始和终止地址。
vpx_codec_err_t res;
初始化了返回值。这返回只返回了错误信息。
uint32_t frame_sizes[8];
int frame_count;
2
这个是给后面一个压缩包解码出多个帧的情况用的。从这个frame_sizes尺寸看应该是最多8帧。
if (data == NULL && data_sz == 0) {
ctx->flushed = 1;
return VPX_CODEC_OK;
}
2
3
4
如果没有数据就直接返回。
// Reset flushed when receiving a valid frame.
ctx->flushed = 0;
2
有数据就先flush。
// Initialize the decoder on the first frame.
if (ctx->pbi == NULL) {
const vpx_codec_err_t res = init_decoder(ctx);
if (res != VPX_CODEC_OK) return res;
}
2
3
4
5
如果没有ctx->pbi就先初始化。从注释上看,这个ctx->pbi为空是在第一帧才会出现的情况。
这个ctx->pbi前面经常见到,从这种在第一帧初始化的操作,看来是用来在解码过程中存储一些临时数据的变量。
res = vp9_parse_superframe_index(data, data_sz, frame_sizes, &frame_count,
ctx->decrypt_cb, ctx->decrypt_state);
if (res != VPX_CODEC_OK) return res;
2
3
从这个函数名上看,首先是读取superframe。
查一下superframe的概念,就是vpx可以将多个帧放在一个压缩包里。所以这里的frame_sizes和frame_count应该就是“输出结果”,读取superframe就是读取出superframe里面帧的数量和每个帧数据的大小。
if (ctx->svc_decoding && ctx->svc_spatial_layer < frame_count - 1)
frame_count = ctx->svc_spatial_layer + 1;
2
SVC是指可适性视频编码(Scalable Video Coding),详情请看《SVC和视频通信》。
// Decode in serial mode.
if (frame_count > 0) {
2
首先是frame_count>0的情况。这个应该是解包superframe一个数据包有好几个帧的情况。
int i;
for (i = 0; i < frame_count; ++i) {
2
3
一个循环对每个帧进行解压。
const uint8_t *data_start_copy = data_start;
const uint32_t frame_size = frame_sizes[i];
2
首先是获取帧数据起点和大小。
vpx_codec_err_t res;
if (data_start < data || frame_size > (uint32_t)(data_end - data_start)) {
set_error_detail(ctx, "Invalid frame size in index");
return VPX_CODEC_CORRUPT_FRAME;
}
2
3
4
5
数据错误就报错返回。
res = decode_one(ctx, &data_start_copy, frame_size, user_priv, deadline);
if (res != VPX_CODEC_OK) return res;
2
这个decode_one应该就是解码的核心函数了。
data_start += frame_size;
每次解码完成后就更新帧数据起点,很合理。
}
帧解码循环结束。
} else {
接下来是frame_count<=0时的操作
while (data_start < data_end) {
这里应该就是没有frame_count采用直接扫描的方式
const uint32_t frame_size = (uint32_t)(data_end - data_start);
frame_size也是计算出来的
const vpx_codec_err_t res =
decode_one(ctx, &data_start, frame_size, user_priv, deadline);
if (res != VPX_CODEC_OK) return res;
2
3
核心操作依旧是这个decode_one。
// Account for suboptimal termination by the encoder.
while (data_start < data_end) {
const uint8_t marker =
read_marker(ctx->decrypt_cb, ctx->decrypt_state, data_start);
if (marker) break;
++data_start;
}
2
3
4
5
6
7
接下来这个应该是扫描直到找到下一个帧的起始标记。
}
}
2
循环结束。
return res;
}
2
函数结束。
可以看出,这个decoder_decode主要是解析出数据包中帧的数量,然后对每一帧调用decode_one进行解码。
# decode_one
再看看这个decode_one又是什么
static vpx_codec_err_t decode_one(vpx_codec_alg_priv_t *ctx,
const uint8_t **data, unsigned int data_sz,
void *user_priv, int64_t deadline) {
(void)deadline;
2
3
4
函数开始。
// Determine the stream parameters. Note that we rely on peek_si to
// validate that we have a buffer that does not wrap around the top
// of the heap.
if (!ctx->si.h) {
int is_intra_only = 0;
const vpx_codec_err_t res =
decoder_peek_si_internal(*data, data_sz, &ctx->si, &is_intra_only,
ctx->decrypt_cb, ctx->decrypt_state);
if (res != VPX_CODEC_OK) return res;
if (!ctx->si.is_kf && !is_intra_only) return VPX_CODEC_ERROR;
}
2
3
4
5
6
7
8
9
10
11
12
这是什么操作,没懂。
ctx->user_priv = user_priv;
// Set these even if already initialized. The caller may have changed the
// decrypt config between frames.
ctx->pbi->decrypt_cb = ctx->decrypt_cb;
ctx->pbi->decrypt_state = ctx->decrypt_state;
if (vp9_receive_compressed_data(ctx->pbi, data_sz, data)) {
ctx->pbi->cur_buf->buf.corrupted = 1;
ctx->pbi->need_resync = 1;
ctx->need_resync = 1;
return update_error_state(ctx, &ctx->pbi->common.error);
}
check_resync(ctx, ctx->pbi);
2
3
4
5
6
7
8
9
10
11
12
13
14
15
核心操作应该就是这个vp9_receive_compressed_data了。
看这样子应该是出错返回1,不出错返回0。
return VPX_CODEC_OK;
}
2
3
函数结束。
特别注意一下最后调用的这个check_resync:
static INLINE void check_resync(vpx_codec_alg_priv_t *const ctx,
const VP9Decoder *const pbi) {
// Clear resync flag if the decoder got a key frame or intra only frame.
if (ctx->need_resync == 1 && pbi->need_resync == 0 &&
(pbi->common.intra_only || pbi->common.frame_type == KEY_FRAME))
ctx->need_resync = 0;
}
2
3
4
5
6
7
这里面注释写道解码器会在接收到关键帧或仅帧内编码帧时进行resync,相对应的就是在收到帧间编码帧时不会resync。这个操作应该是和帧间编码有关的,可能是在收到无帧间编码的帧时清除帧间编码遗留的数据。